

Présentation du projet
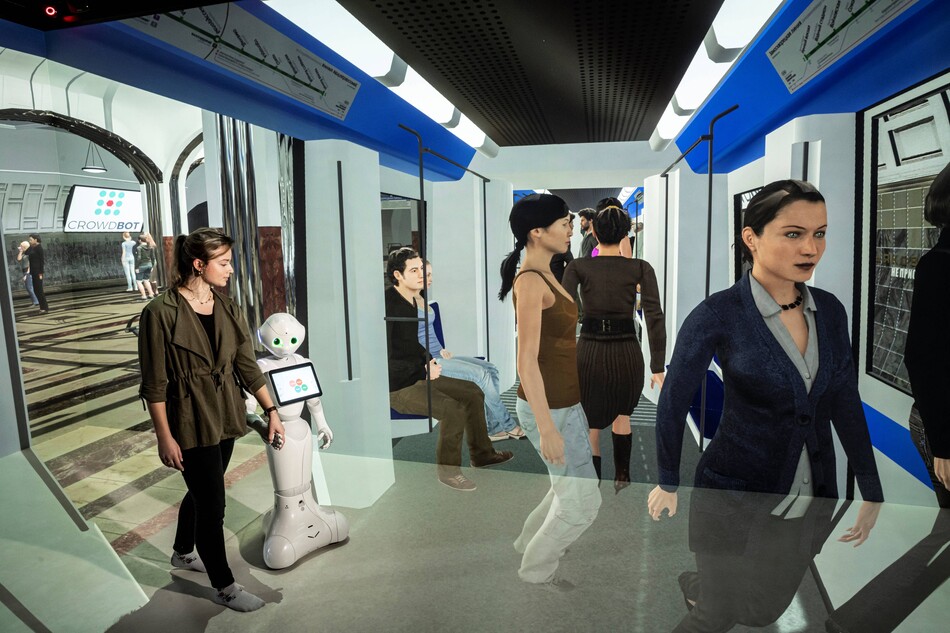
Les robots actuels sont programmés pour s'arrêter lorsqu'ils s'approchent trop près d'un être humain. Si cette précaution permet d'éviter les collisions, elle peut empêcher le robot d’entrer dans des zones très fréquentées. Pour lui permettre d’évoluer dans ce genre d’environnements, le projet CrowdBot a mis au point de nouveaux outils d’analyse et de contrôle.
Les travaux du consortium ont par exemple contribué à une meilleure estimation du mouvement de la foule autour des robots et à une amélioration de leurs capacités cognitives visant à prédire l'évolution à court terme de cette même foule. Un module de navigation permettant aux robots d’effectuer des mouvements sûrs à proximité des personnes a également été mis au point.
Ces nouvelles fonctionnalités ont pu être testées sur plusieurs plateformes technologiques (robot humanoïde, fauteuil roulant semi-autonome, …). Le consortium a en outre décidé de rendre librement accessible les jeux de données et certains algorithmes émanant du projet dans la perspective de faire progresser plus rapidement sa thématique de recherche.
A partir de scénarios impliquant des robots autonomes ou semi-autonomes dans des contextes allant de lieux normalement fréquentés à des cas d’évacuation, CrowdBot a enfin fourni des pistes concrètes pour l’élaboration de normes et de lois susceptibles d’encadrer la présence de robots dans l'espace public.
Infos clés
- Financement U.E. : 4 millions €
- Durée : 4 ans
- Coordinateur : Inria
- Rennes, Bretagne